Tracking accuracy
To test the accuracy of my tracking system (0.01°), I recorded a video in which I tracked the star Hamal (HD 12929) with the dish.
This is just to compare, that does not mean that system only works at night.
The look of that night, stars and moon is this:
It seems to work quite well.
Update. The easiest way to program tiny1614 via UPDI
Despues de la actualizacion de MegaTinyCore a la versión 2.5.10 he probado un nuevo metodo más facil para programar el AVR.
Descubri el Mini UPDI programmer, que me parecio interesante, por lo que encarge unos cuantos PCBs y empece a jugar.


Pero me di cuenta que este programador podria convertirlo facilmente en un SerialUPDI en vez de un jtag2updi como originalmente se diseño y esto permitia simplificar el circuito suprimiendo el ATiny y añadiendo un diodo 1N4148 donde iban las resistencias de 1k y uniendo el anodo del diodo al pin UPDI. Mirar la documentación de SerialUPDI.

Debemos de instalar el driver del adaptador USB para que nos reconozca el programador como un puerto serie y seleccionarlo en el programa.
Y podemos seleccionar el programador SerialUPDI, la opción turbo va muy bien.

Una mejora importante en esta versión que he visto es que ya funciona con velocidad de 20MHz y los delay son correctos.


Referencias
Dish error map
A lo largo de los años hemos aprendido que la parábola tiene errores en azimut y elevación, con un poco de trabajo podemos conseguir curvas de error aprovechandonos del sol, pero conseguirlas para todos los valores de azimiut y elevación es imposible.
EL error de elevación se compensa con facilidad con un inclinometro digital de precisión, pero el de azimuth no tenemos ningun medio de solcuucionarlo de forma sencilla.
Despues de mucho googlear, descubri que en el mundo astronomico eran capaces de resolver una imagen del cielo con una precision de un par de arcsec que para nuestro mundo es valido.
Necesitaba una camara, un tubo guia y software que resolviera las ecuaciones.

La primera prueba es ver si en un entorno urbano se verian suficientes estrellas para determinar la posición del cielo a la que se esta apuntando.
Para mi sorpresa las camaras tienen tanta sensibilidad que son capaces de ver estrellas que el ojo humano no ve.
He probado distintas camaras y con todas he conseguido ver estrellas hasta una elevacion de 5º que nunca crei que seria capaz de tener.
El setup definitivo es:
- Camara ZWO ASI120 monocromo
- Tubo guia ZWO 30F4
- PHD Guiding 2, para gestionar las capturas de imagenes
- Astrometry.net en local para resolver las imagenes
- Home made sofware para los calculos

La forma de operar es sencilla, hacemos un ajuste con el sol en una posición determinada que nos valdra de referencia. Luego ajustamos la posición que nos da la camara en ese punto para que coincidan.
A partir de ahi ya podemos sacar un mapa de errores en todo el cielo, yo lo hago cada 5 grados en azimut y elevación.
Capturamos la imagen y la resolvemos.

La foto no la sirve PHD Guiding 2 y la resolución Astronomy.net en local.

El software va moviendo la parábola, resolviendo imagen y guardando el error detectado. Internamente todos los programas se comunican via TCP para el intercambio de información.

Las imagenes son en formato FIT y una vez resuelta el softeare guarda los datos correstos para no tener que procesar la información más veces.

Con el barrido completo de la zona de trabajo de nuestra parábola ya tenemos el mapa de errores.

Este es el resultado de mi parabola de 180cm.
Evidentemente tenemos que adaptar el software de tracking para que manje errores de azimut y elevación.

Algunos enlace de interes:
Astrometry web
http://nova.astrometry.net/user_images/5408536#annotated
https://github.com/david-siegert/astrometry
Astrometry local
http://astrometry.net/use.html
http://astrometry.net/doc/build.html
https://github.com/dstndstn/astrometry.net
Instalar en Windows 10 WSL
https://groups.google.com/g/astrometry/c/I2PDA8J466o/m/N3-9OzRMAQAJ
Bases de datos locales imágenes referencia
http://data.astrometry.net/
Fits
https://fits.gsfc.nasa.gov/fits_home.html
https://github.com/piotrsrodka/FitsViewer
PHD Guiding 2
https://openphdguiding.org/
https://github.com/agalasso/phd2client
Cámara CCD
https://valkanik.com/catalogo/camaras-ccd-cmos/camaras-monocromaticas/camaras-autoguiado-y-planetaria/
Tubo guía
https://valkanik.com/comprar/tubo-de-guiado-zwo-30f4/
The easiest way to program tiny1614 via UPDI
Despues de la fusión de ATMEL y Microchip ha nacido una nueva generacion de micros tinyAVR serie 1.
Estos micro no se programan via ISP e incorporan un nuevo protocolo UPDI (Unified Program and Debug Interface) que permite con un pin programar y debugear.
Por comodidad uso el IDE de Arduino, en las referencias podeis encontrar como instalarlo, y con un simple conversor USB-TTL + una R de 4K7 se prof¡grama junto con el programa en python pyupdi.
La numeracion de los puertos es numerica, PA6 es 2, tenerlo en cuenta a la hora de programar.
En el IDE de Arduino debeis de marcar la casilla de mostrar detalle de compilación, dentro de Preferencias, para saber donde guarda el fichero Hex que debemos grabar.

«C:\Users\<tu nombre>\AppData\Local\Arduino15\packages\DxCore\tools\avr-gcc\7.3.0-atmel3.6.1-azduino4b/bin/avr-size» -A «C:\Users\<tu nombre>\AppData\Local\Temp\arduino_build_958864/sketch_sep21a.ino.elf»
En ese directorio os encontrareis vuestra compilacion.

Yo ejecuto pyupdi desde ese mismo directorio con la siguiente linea de comando.
C:\Users\<tu nombre>\AppData\Local\Temp\arduino_build_958864>python «<Donde tengas el programa>\pyupdi\updi\pyupdi.py» -d tiny1614 -c COM<?> -f sketch_sep21a.ino.hex -v

Cosas que he aprendido a base de pruebas:
- No vale cualquier adaptador USB-TTL, solo me funciono con un FTDI original.
- En el entorno de arduino no se puede seleccionar 20 MHz de velocidad de reloj interna, no funciona.
- La opcion de milis() he tenido que desactivarla, porque no calcula bien los tiempos.

Referencias
Software en python para programar via UPDI y un USB-TTL adaptador
Trinocular stereo microscope 3.5x-90x
Cansado de mover cosas para poder fotografiar las imagenes del microscopio con camara independiente o cama en ocular he dicidico adquirir un trinocular a mi coleción.

Este modelo comprado en amazon a priori tenia todo lo necesario que yo buscaba.
Esto junto un barlow (Microscope Auxiliary Objective Lens) de 0.5X que tengo del stereo, me permite cubrir todas mis necesidades.

Con el adaptador que viene para montar la camara tiene mucha ampliazción, necesitamos monta el adaptador de 0.5X que también adjunta para aumentar el campo de visión.
Y aqui se acaba lo bonito porque no consigo enfocar con esta lente.
Como el tema es de altura que le falta, lo más facil, es imprimir en 3D un adaptador que le campo, y la longitud que he calculado para mi camara es de 28mm. COn este valor puedo enfocar al máximo y al minimo zoom con y sin barlow.
Esta es mi camara.

Este es el adaptador




Y ahora unas imagenes con disinto zoom y barlow.
En la camara tengo montado la lente 0.5X.

Con barlow 0.5x max zoom microscopio

Sin barlow 0.5x max zoom microscopio

Con barlow 0.5x min zoom microscopio

Sin barlow 0.5x min zoom microscopio
Algunas imagenes de componentes 0402
Y 0603

Esperoque os sea útil la info.
CH341A Mini Programmer

Recientemente he adquirido en amazon el programador ch341a por disponer de una herramienta que me permita manejar mas dispositivos.
En este enlace podemos descargar software y drivers para la grabacion de dispositivos soportados por el software.
Pero como todo esta inventado, y aprobechando el ch341a hay un programa que permite grabar los micros AVR.
Este programa soporta un mayor numero de dispositivos.
Aqui podemos encontrar esquemas y más documentación del mencionado programador.
En este enlace hay información de las modificaciones a las placas para conectar directamente los aTinny.
Dish working again
Con el rotor reparado toca montarlo, pero hare una actualización de sistema de control de azimut.
El encoder que es de 13 bits lo desmultiplicaremos por 3 para conseguir una resolución de 3*2^13 = 24576 pulsos por 360 grados, algo mas que 14 bits de resolucion.
Pora ello montaremos un eje en el centro del rotor que se sujetara a la base del rotor.

De esta forma cuando el rotor gire, el eje no se movera.
Y ya pasamos al montaje en el terrado

Como el desmontaje me costo mucho, dos personas las pasamos canutas para sacar todo, he desmontado el plato y primero subo el soporte.




Ahora vamos a por el encoder, a la base una corona de 60 diente y al encoder una de 20 dientes unidas por una correa.

Y como el agua es nuestro mayor enemigo, lo cubro todo con una tapa de aluminio.

Y ahora ya puedo montar el plato, que se necesitan 3 personas para que no te dejes la vida en el intento.

Y con la experiencia adquida queda claro que hay que compensar el desequilibrio en el rotor al tener mucha carga en el lado del disco y poco en el contrario.


34 kg nos ayudaran a que el rotor trabaje mas compensado y como con la prueba de carga hemos comprobado que va sobrado de carga, esto debe de ir fino.
Ahora con la ayuda del sol ajustaremos el offset necesario para que esto vaya como se espera.
Y ya vuelvo a estar activo otra vez.
My slewing drive back to life

Empezamos metiendo el exterior del nuevo rodamiento en su alojamiento, para ello nos ayudamos del exterior del viejo.






Sobre todo usar grasa de montaje para que todo sea mas facil

Ahora podemos introducir el rodamiento.

Limpiamos y engrasamos el rodamiento de la base del rotor, que no he podido cambiar por no encontrarlo en el mercado.

Y lo introducimos en el rotor.

Ahora montamos los extremos del sinfin que ataca el motor.






Y engrasamos todo el conjunto montado con Mobilux EP2


Paramos de engrsar cuando veamos que la grasa ha rellenado todo el interior.

Montamos el motor que por suerte la chaveta es de una medida estandar y facil de conseguir.


Calentamos un poco el rotor para que la grasa se haga mas fluida y rellene todos los huecos.

Y lista para montar los sellos, que tampoco los he cambiado por no ser facuiles de conseguir

Y por ultimo los sellos.

La pieza interior no sabemos a ciencia cierta que este en su sitio, le he hecho unos agujeros para poder usar la herramienta que hice para la estracción y poder darle mas apriete que el que se consigue a mano.
Por ultimo la pieza que impide que la piza interior se mueva.

Ahora viene la parte buena del rotor y es hacerle una prueba de carga.

He tenido rodando el rotor mas de 8 horas con 167 Kg para ver si la reparación ha sido correcta, cosa que si fue.
Una vez finalizada el test de esfuerzo reaprete la pieza interior un poco, ya que como consecuencia del trabajo en carga las holguras se han asentado.
Y lo siguiente, el montaje …
My first PCB with stencil & IR heater
He decidido actualizarme un poco y empezar a usar técnicas de montaje de smd.

Como china se ha convertido en nuestro suministrador oficial de bajo coste, ahora es accesible comprarse un horno para reflow y si usamos el horno porque no vamos usar pasta con stencil para aplicar la pasta de soldar.
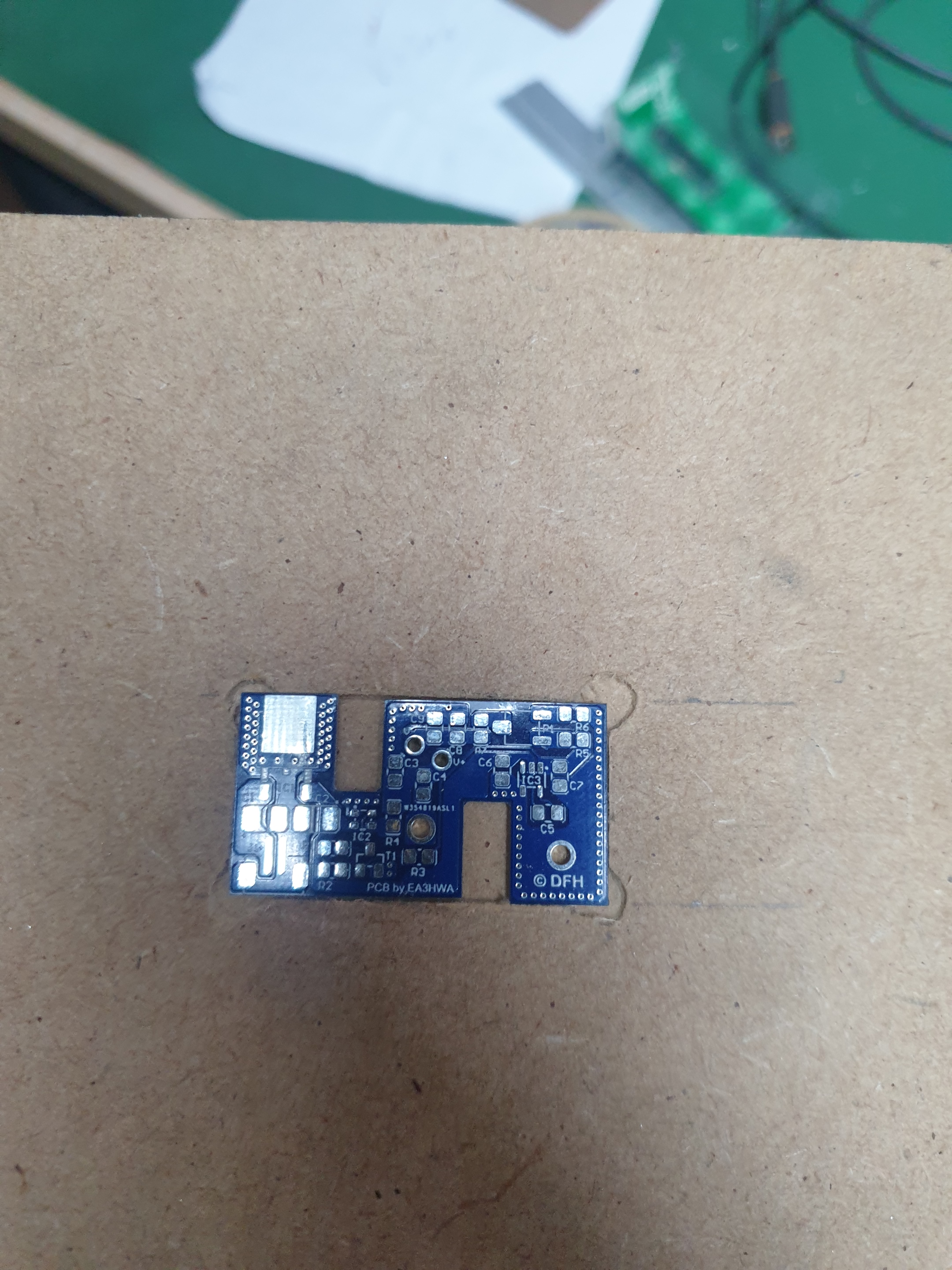
El último proyecto que he realizado y como Rafa EA3HWA me diseño el pcb como Dios manda decidi pedir un stencil a la vez que los PCBs, con un coste de 10$ más.
No se si este es el mejor metodo, pero para mi me ha sido facil y el resultado esta a la vista.
Empezamos con un trozo de DM para insertar el PCB de forma que quede fijo y a nivel.

He usado la fresa para rebajar el hueco.

Ahora alineamos el stencil

Ya tenemos preparado el PCB, ahora los materiales necesarios, espatula y estaño en pasta.

Deposito un poco de pasta ebcima y con la espatula y apretando hacia abajo la esparzo por todos los agujeros.


Ahora retiramos el stencil y vemos el resultado

A primera vista parece que ha quedado bien, pero lo miramos como el microscopio para asegurarnos.
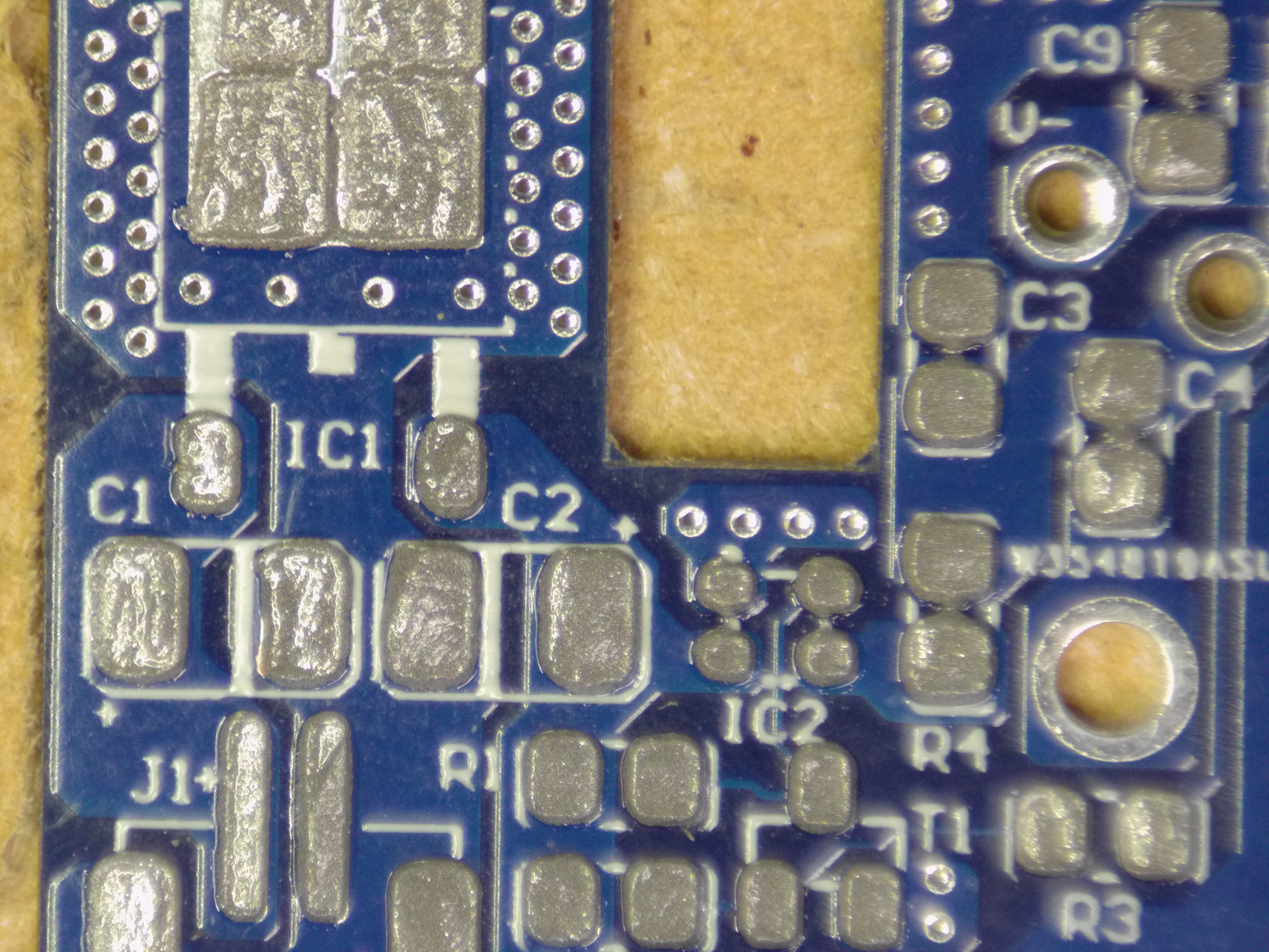

Parece que esta bien.
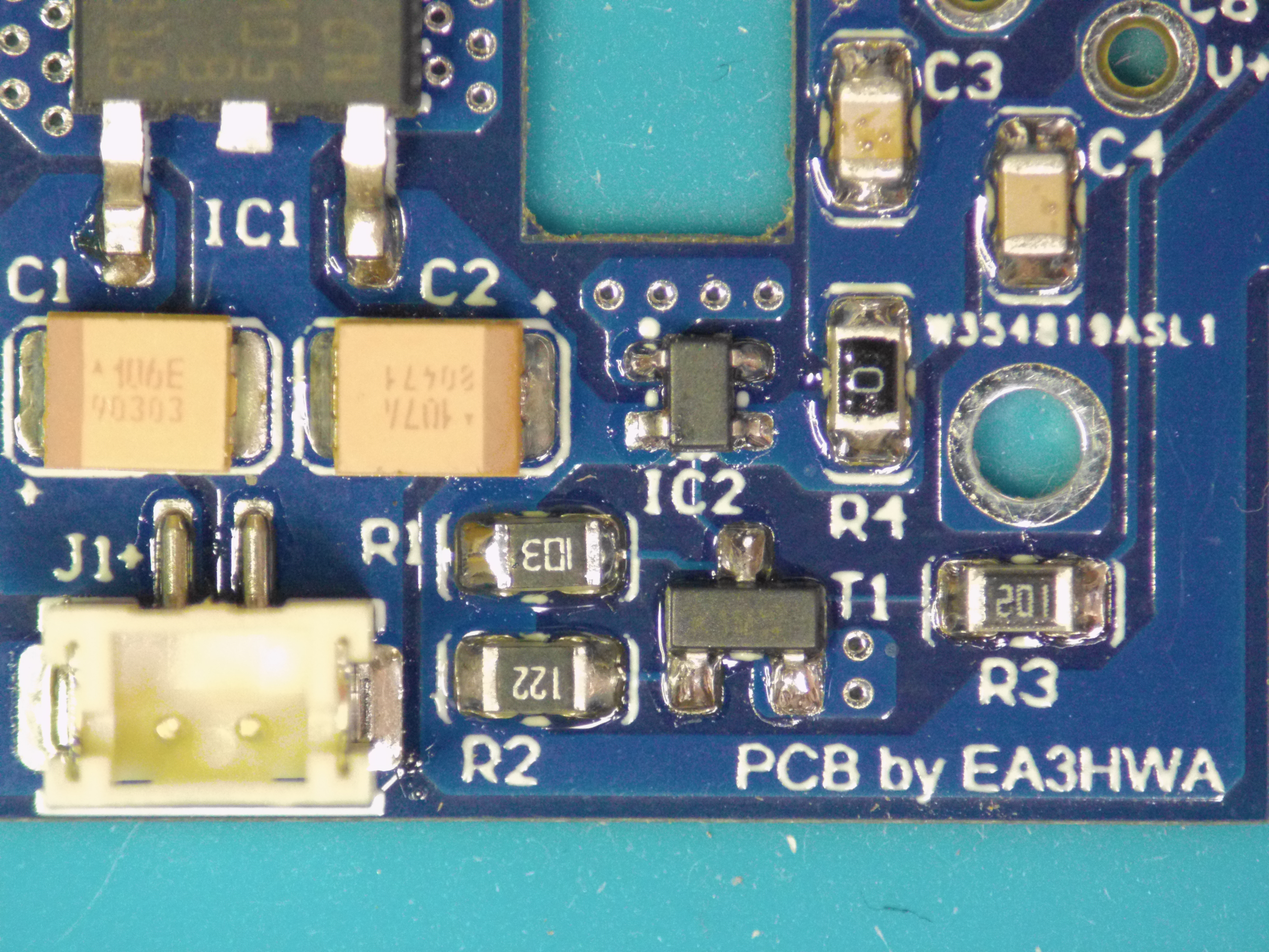
Ahora la parte mas entretenida, poner los componentes uno a uno, que mientras no tenga una maquina Pick & Place me toca hacerlo así.
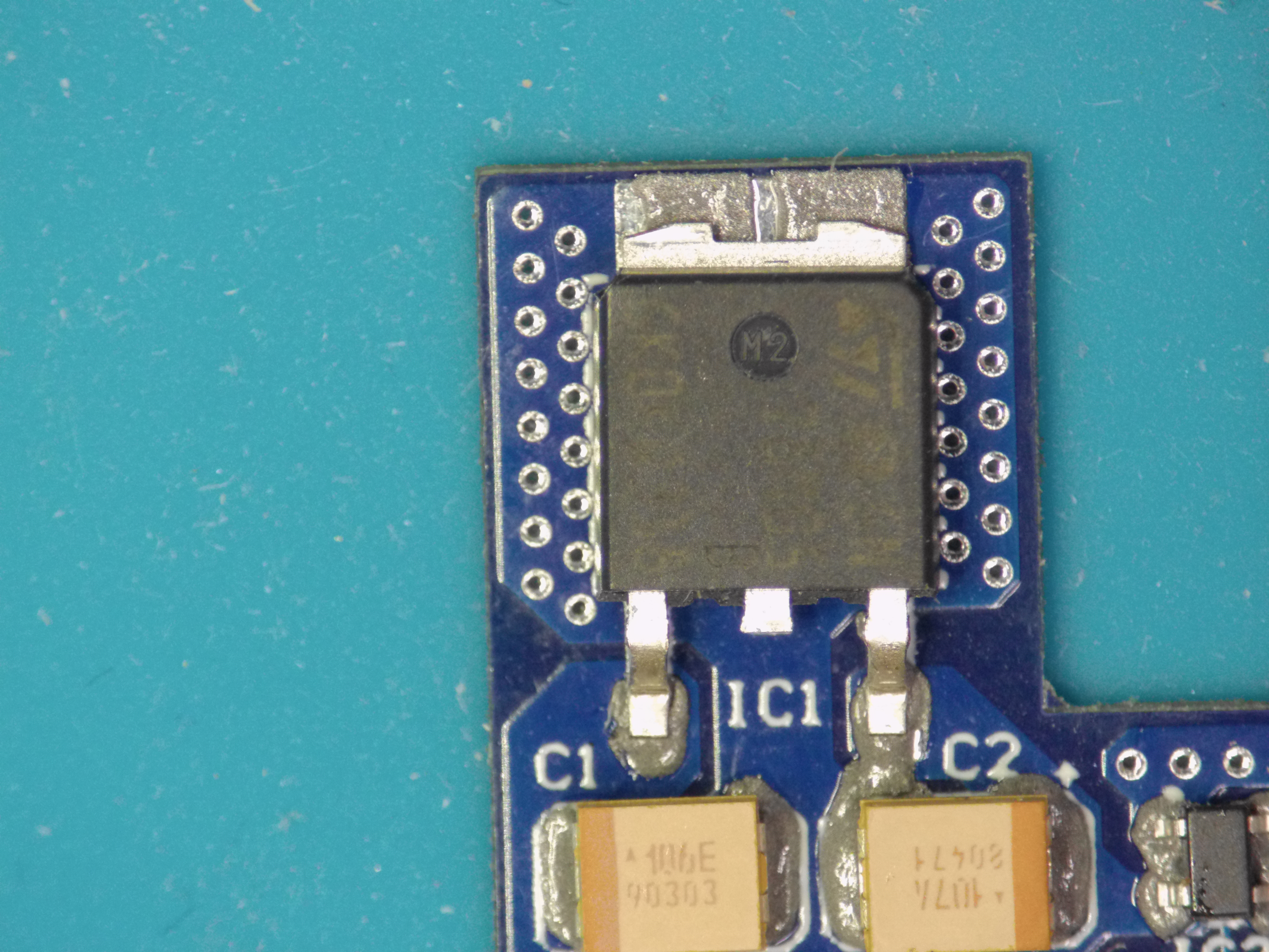

Y el último paso, al horno.

Toca esperar unos 8 minutos que acabe el proceso.

Y listo para probar.

Y lo mejor, funciona !!! 🙂 🙂
My slewing drive broke
Durante la última operación de tracking del sol para ajustes mi parábola dejo de moverse en azimut.

Pude comprobar que el motor giraba, pero el rotor no giraba.
Me toco demontar el rotor de la parábola, cosa que no es sencilla.

Una vez con el rotor abajo no me quedo mas remedio que desmontarlo despúes de un primer vistazo. Este rotor es un SD3 de sunslew.

Pude comprobar la presencia de oxido cosa que no es buena, a pesar de estar selladas las uniones le ha entrado agua.



Hay que desmontar la pieza interior para poder sacar el conjunto. Pero primero desmontamos la contraturza que impide que salga la parte interior.

Como consecuencia de entrada de agua al sacar los dos tornillos que la mantiene unida esta no gira. Toca hacer un útil para poder extraerla.



Ahora ya podemos sacar la corona.

Obervamos que el rodamiento esta destrozado.
Tanbien podemos sacar el sinfin, sacando las dos tapas laterales.

Quedando en en interior un cojinete de apoyo.


Siguiente paso es decalar el cojinete, para ello usamos el propio puerpo interior para ejercer sobre el presión con un extractor.

Y estos son los restos del rodamiento.

La jaula se rompio y a partir de ahi todo fue en cascada hasta clavarlo.
Este Rodamiento de rodillos cónicos, jaula de chapa es de 55x80x17 y referencia 32911 .
Como consecuencia de agarrotamiento y como el motor si giraba verifique que la chaveta del eje (4x4xx20) del motor se partio.

Ahora toca buscara las piezas rotas y sustituirlas, pero eso en el siguiente capitulo.

